Projects
Ongoing Projects
Multi-uav data muling
In this project, we are studying how to effectively deploy a team of drones to collect data from wireless sensors. Specifically, we are investigating how to minimize the time to collect data while accounting for drone energy consumption and the stochastic nature of wireless communication. We seek to combine offline planning with online decision making that can be validated through both simulations and physical testbed evaluations.
Related Publications:
Jonathan Diller, Peter Hall, Qi Han, Holistic Path Planning for Multi-Drone Data Collection , IEEE International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT), June 2023
Peter Hall, Jonathan Diller, Ava Moon. Qi Han, DroNS-3: Framework for Realistic Drone and Networking Simulators, ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications(DroNet), in conjunction with Mobisys, June 2023


Collaborative UAV-UGV Planning
In many UAV applications, it is more advantageous for a UAV base station to move to a new location after launching UAVs as opposed to remaining in the same position while the UAV performs some given task. In this project we are looking at how to plan UAV routes that minimize mission completion time while accounting for a moving base station. We also consider the relationship between UAV speedand power consumption and look at how scheduling speed can affect route planning.
Related Publications:
Peter Hall, Jonathan Diller, Ava Moon. Qi Han, DroNS-3: Framework for Realistic Drone and Networking Simulators, ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications(DroNet), in conjunction with Mobisys, June 2023
Jonathan Diller and Qi Han, Energy-aware UAV Path Planning with Adaptive Speed, ACM International Conference on Autonomous Agents and Multiagent Systems (AAMAS), June 2023
Acknowledgements: This project is supported by the Army Research Lab.

Mobile augmented reality
Pose Estimation for Mobile Augmented Reality
Ensuring the correct pose of virtual objects is paramount for mobile augmented reality applications centered on virtual object placement. Moreover, this pose estimation must be conducted in real-time and must accommodate dynamically changing user environments. While many approaches derive pose estimation directly from robotics, which may not be the most efficient for mobile devices with limited computational resources, our work focuses on developing methods specifically tailored for real-time pose estimation on mobile devices in dynamically varying environments.
Quality of Mobile Augmented Reality
 Mobile Augmented Reality (MAR) serves two primary applications: Segmentation and Virtual Object Placement. Evaluating quality online enables adjustments to existing segmentation or virtual object pose predictions, enhancing system performance and user experience. To achieve this, our focus lies in identifying a time, energy, and computationally efficient algorithm or neural network capable of working on mobile devices to assess and improve the quality.
Mobile Augmented Reality (MAR) serves two primary applications: Segmentation and Virtual Object Placement. Evaluating quality online enables adjustments to existing segmentation or virtual object pose predictions, enhancing system performance and user experience. To achieve this, our focus lies in identifying a time, energy, and computationally efficient algorithm or neural network capable of working on mobile devices to assess and improve the quality.
Related Publications:
Shneka Muthu Kumara Swamy and Qi Han. Quality Evaluation of Image Segmentation in Mobile Augmented Reality. EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services (Mobiquitous), November 2023
building a robust multi-drone testbed
 We are designing and building an open-source drone platform that is oriented towards academic research. Most of the currently available drone platforms are either proprietary and closed-source, with limited access to flight control software, or are open-source platforms but are either too small to handle on-board computation loads for autonomous behavior or are not very reliable. We hope to fill this gap by designing a reliable, mid-size open-source drone platform that is ideal for multi-drone research.
We are designing and building an open-source drone platform that is oriented towards academic research. Most of the currently available drone platforms are either proprietary and closed-source, with limited access to flight control software, or are open-source platforms but are either too small to handle on-board computation loads for autonomous behavior or are not very reliable. We hope to fill this gap by designing a reliable, mid-size open-source drone platform that is ideal for multi-drone research.
Acknowledgements: This project is supported by Mines REI.
Planning robot communication and motion to evade detection and bypass jamming
Robot teams must communicate to share observations and plans. However, radio communication is subject to detection and interference by adversaries, possibly revealing information about the team’s presence or interfering with the mission. The team must therefore account for such adversarial operations when planning motion and communication. We propose to integrate planning and networking decisions for a team of robots exploring and communicating wirelessly that must evade detection and avoid radio jamming by an adversary.
Related Publications:
Jonathan Diller, Neil Dantam, John Rogers, Qi Han, Communication Jamming-Aware Robot Path Adaptation, Workshop on Distributed Collective Intelligence (DISCOLI), June 2023.
Acknowledgements: This project is supported by Army Research Lab.


Intelligent Prediction of Traffic Conditions via Integrated Data-Driven Crowdsourcing and Learning
Road safety and congestion are a formidable challenge for communities. Current incident management practices are largely reactive in response to road user reports. This project aims to radically transform traffic management, emergency response, and urban planning practices via predictive analytics on rich data streams from increasingly prevalent instrumented and connected vehicles, infrastructure, and people. With the outcome of this project, cities could proactively deploy assets and manage traffic.
Acknowledgements: This project is supported by NSF.
Task Assignment with Failures
 The classical task assignment problem can be applied to various real-world applications such as wild fire monitoring and disaster response. However, in many applications agents are not guaranteed to complete their assigned task 100% of the time and agents might become faulty during task execution, requiring one to reassign agents to tasks. In this work, we consider how to maximize the probability that all tasks are completed while considering the probability that an agent could fail during task execution.
The classical task assignment problem can be applied to various real-world applications such as wild fire monitoring and disaster response. However, in many applications agents are not guaranteed to complete their assigned task 100% of the time and agents might become faulty during task execution, requiring one to reassign agents to tasks. In this work, we consider how to maximize the probability that all tasks are completed while considering the probability that an agent could fail during task execution.
Acknowledgements: This project is supported by the Army Research Lab.
Computational Collaboration for Heterogenous Networked Robots
This project focuses on various collaborations within heterogeneous networked robot systems, combining UAVs and UGVs, for diverse applications. We aim to investigate how to overcome the computational and energy constraints on UAVs by using UGVs, how to facilitate the data collection and sensing process of such systems, and how to efficiently deploy these robots in mission areas. The ultimate goal of this project is to improve system performance and operational effectiveness in various environments.
Related Publications:
Carlson, Benjamin, Chenyang Wang, and Qi Han. “RAREST: Emulation of Augmented Reality Assisted Multi-UAV-UGV Systems.” Proceedings of the First Workshop on Metaverse Systems and Applications (MetaSys). 2023.
Wang, Chenyang, Benjamin Carlson, and Qi Han. “Object Recognition Offloading in Augmented Reality Assisted UAV-UGV Systems.” Proceedings of the Ninth Workshop on Micro Aerial Vehicle Networks, Systems, and Applications (DroNet). 2023.
Wang, Chenyang, and Qi Han. “Enabling Energy Efficient Augmented Reality in Multi-UAV-UGV Systems.” IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events (PerCom Workshops). 2023.




Completed Projects
Crowdsourcing
Spatial crowdsourcing (SC) has emerged in the past few years and it consists of location-specific tasks that require people to be physically at specific locations to complete them. This project studies different variants of the worker selection problem, i.e., how to assign the workers to complete different tasks. In addition, this project studies how to make use of visual data (e.g., images, videos) contributed by workers for different applications.
Integrated Network Design, Motion Planning, and Online Communication
Multi-robot exploration and monitoring necessarily couples decisions about motion and communication. Robots’ motion determines possible network topologies and bandwidth; their communi- cation determines their ability to coordinate motion and relay observations. We propose to integrate symbolic decisions about network topology, continuous decisions about robot motion, and online feedback through localization and network monitoring for a team of robots exploring and communicating wirelessly.
Acknowledgements: This project is supported by Army Research Lab.
Enabling Smart Underground Mining with an Integrated Context-Aware Wireless Cyber-Physical Framework
To reduce reliance on other countries for minerals (e.g., coal, rare-earth metals), the USA has seen an invigoration of mining activity in recent years. Unfortunately, miners often have to work in dangerous environments where there is risk of mine explosions, fires, poisonous gases, and flooding in tunnels. The principal objective of this proposal is to devise, design, prototype, and test a fundamentally novel wireless cyber-physical framework of low-cost, energy-efficient, and reliable sensor nodes and commodity smartphones for monitoring, tracking, and communication, to improve miner safety in underground mines.
Acknowledgements: This project is supported by NSF.
IoT-based Adaptive Landscape Irrigation using Reclaimed Water
Irrigation with saline water is a complex problem requiring consideration of many factors such as irrigation water quality, soil conditions, plant tolerance thresholds, and weather forecasts. This project will develop a prototype wireless sensor network and a control system that consider sensor inputs, user-defined thresholds and weather forecasts to determine when and where to irrigate. This project offers a transformative approach for landscape irrigation based on closed-loop control. Landscape irrigation accounts for a majority of urban summer domestic water use; irrigating with reclaimed water has the potential to substantially extend water resources but may pose hazards to environmental and plant health. Existing smart irrigation control systems have proved water-efficient but have limitations and have not been widely adopted. The system we are developing is unique in its combination of wireless water and soil quality sensors into an advanced network capable of controlling several critical agronomic variables, while welcoming but limiting the need for human inputs.
Acknowledgements: This project is supported by NSF.
Infrastructure for Robust Interactive Underground Robots
The project will provide a team of heterogeneous robots for deployment in underground environments, as well as sensors, networking equipment, and augmented reality headsets to facilitate their effective use. This infrastructure will support the institutional theme of research on underground environments, including underground inspection and search and rescue applications. This infrastructure will be integrated together and deployed within the Edgar Mine, an underground research and evaluation facility owned and operated by the Colorado School of Mines.
Acknowledgements: This project is supported by NSF.
Move to Talk, Talk to Move: Tightly Integrated Communication and Controls for Coordinated Swarms of Small Spacecraft
This project aims to develop a framework for tight integration of communication and controls as an enabling technology for NASA to effectively deploy swarms of small spacecraft. This framework will make it possible for a network of self-organizing small spacecraft to be highly collaborative among themselves for the monitoring of time-varying and geographically distributed phenomena.
Acknowledgements: This project is supported by NASA.
A Heterogeneous Networking Test Bed
 Numerous interesting applications have been enabled by embedded sensing technologies and significant research progress on wireless sensor networks. To further ensure a wider adoption of this emerging technology, seamless integration of wireless sensor networks with other existing networks such as WiFi and the Internet is a must. In order to address challenges that arise from such an integrated infrastructure, this project builds HeteroNet, a heterogeneous networking infrastructure, by augmenting an existing flat and homogeneous sensor network test bed. HeteroNet integrates resource constrained sensor nodes and more powerful sensing devices, stationary nodes, mobile nodes, and resource sufficient servers. These nodes communicate in wireless or wired fashion. This test bed establishes an experimental infrastructure to serve as a platform for development, testing, validation, and evaluation of our current research on middleware services for emerging applications on hybrid networks.
Numerous interesting applications have been enabled by embedded sensing technologies and significant research progress on wireless sensor networks. To further ensure a wider adoption of this emerging technology, seamless integration of wireless sensor networks with other existing networks such as WiFi and the Internet is a must. In order to address challenges that arise from such an integrated infrastructure, this project builds HeteroNet, a heterogeneous networking infrastructure, by augmenting an existing flat and homogeneous sensor network test bed. HeteroNet integrates resource constrained sensor nodes and more powerful sensing devices, stationary nodes, mobile nodes, and resource sufficient servers. These nodes communicate in wireless or wired fashion. This test bed establishes an experimental infrastructure to serve as a platform for development, testing, validation, and evaluation of our current research on middleware services for emerging applications on hybrid networks.
People
- Qi Han (Faculty)
- Alan Marchiori (PhD Student)
- Lin Guo
- Josh Thomas
- Nicholas Gerstle
Publications
- Lin Guo and Qi Han, Reliable Data Collection from Mobile Users with High Data Rates in Wireless Sensor Networks, IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), San Francisco, June 2012.
- Alan Marchiori, Lin Guo, Josh Thomas and Qi Han, Realistic Performance Analysis of WSN Protocols Through Trace Based Simulation, The Seventh ACM International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks (PE-WASUN), in conjunction with MSWiM, Bodrum, Turkey, October 2010.
View more information on WSN Profiler here. - Alan Marchiori and Qi Han, A Two-stage Bootloader to Support Multi-application Deployment and Switching in Wireless Sensor Networks, IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Vancouver, Canada, August 2009.
- Alan Marchiori and Qi Han, A Foundation for Interoperable Sensor Networks with Internet Bridging, The Fifth Workshop on Embedded Networked Sensors (HotEmNets), June 2008
Acknowledgements
This project is supported in part by NSF grant CNS-0855060.
Building Energy Monitoring and Control using Wireless Sensor Networks
The ultimate goal of this dissertation is to develop the required network and systems-level software to support distributed monitoring and control using the resource constrained platforms used in wireless sensor networks. We use a building energy monitoring and control application to demonstrate the usefulness of our system. Building energy management is necessary to tailor building performance to the occupant rather than forcing the occupant to change their behavior in order to conserver energy. Wireless sensor networks are a good fit to solve this problem because they can be used to create low-cost communication networks. These networks can be used to share information between separate systems. However, current wireless sensor network architectures and systems have focused on centralized systems with less emphasis on peer to peer information sharing.
Our main contributions are in two distinct areas. 1) WSN networking and systems. We are developing a complete WSN architecture that is better optimized for the problem of distributed monitoring and control using peer to peer communication. Central to our approach is a novel multicast implementation for IPv6 WSNs that we have developed. Using multicast communication allows sensor nodes to efficiently share data in a distributed fashion while the use of standard IPv6 communication greatly improves interoperability. 2) Building energy management. Previous studies of building energy consumption have focused on large appliances and group all small devices into the category of miscellaneous electrical loads. By embracing WSN-based monitoring and developing improved non-intrusive load monitoring techniques for these devices we are able to provide a more detailed analysis of building energy consumption and how human behaviors affect consumption. Our preliminary studies have demonstrated a 7%-14% reduction in energy consumption using a distributed WSN-based control system.
People
- Qi Han (Faculty)
- Alan Marchiori (PhD Student)
Publications
- Alan Marchiori, William Navidi, Leiko Earle, and Qi Han, Building the case for automated building energy management, ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings (BuildSys), in conjunction with ACM SenSys, Toronto, Canada, November 6, 2012.
View the data here. - Alan Marchiori, Doug Hakkarinen, Qi Han, and Leiko Earle, Circuit-Level Load Monitoring for Household Energy Management, IEEE Pervasive Computing, Special Issue on Smart Energy Systems, Vol. 10, No. 1, January-March 2011.
- Alan Marchiori, Network and Systems Support for Building Energy Monitoring and Control using Wireless Sensor Networks, Ph.D dissertation, Colorado School of Mines, 2011
- Alan Marchiori and Qi Han, PIM-WSN: Efficient Multicast for IPv6 Wireless Sensor Networks, The 12th IEEE International Symposium on a World of Wireless Mobile and Multimedia Networks (WoWMoM), 2011.
- Alan Marchiori and Qi Han, Distributed Wireless Control for Building Energy Management, ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings (BuildSys), in conjunction with ACM SenSys, Zurich, Switzerland, November 2010.
View the Mote Designs here. - Alan Marchiori and Qi Han, Using Circuit-Level Power Measurements in Household Energy Management Systems, ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings (BuildSys) in conjunction with ACM SenSys, Berkeley, California, November 2009. Best Paper Award.
- Alan Marchiori and Qi Han, A Two-stage Bootloader to Support Multi-application Deployment and Switching in Wireless Sensor Networks, IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Vancouver, Canada, August 2009.
- Alan Marchiori and Qi Han, A Foundation for Interoperable Sensor Networks with Internet Bridging, The Fifth Workshop on Embedded Networked Sensors (HotEmNets), June 2008
Acknowledgements
This work was supported in part by NSF grant CNS-0855060 and the U. S. Department of Energy (through the National Renewable Energy Laboratory under contract number DE-AC36-08GO28308).
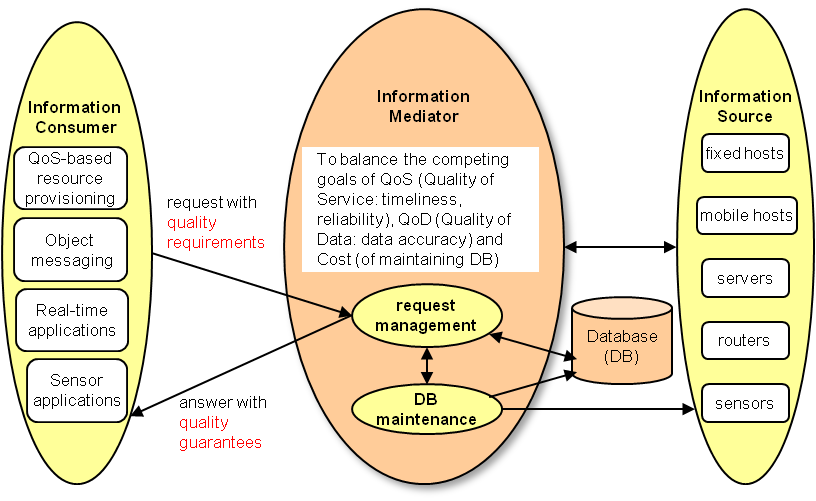
Dynamic Context Monitoring and Modeling for QoS-aware Applications
In the future, we are likely to see a tremendous need for context-aware applications which adapt to available context information such as physical surroundings, network or system conditions. The success of end-to-end adaptation relies on accurate and timely knowledge of the changing context information. This project aims to provide a fundamental support for context-aware applications – a context information collection service. This service delivers the right context information to the right user at the right time. The complexity of providing the context information service arises from (i) dynamically changing status of information sources; (ii) diverse user requirements in terms of Quality of Service (QoS: such as response timeliness or reliability etc.) and Quality of Data (QoD, such as data accuracy or freshness); and (iii) constantly changing system conditions.
In this project, we take into consideration the dynamic factors mentioned above and focus on addressing the tradeoffs between QoS, QoD and resource consumption by exploiting the tolerance of applications to quality violations. The objective is to ensure that applications receive the information at the desired levels of quality while ensuring effective utilization of underlying resources. We have focused on designing adaptive and cost-effective algorithms for the representation, collection and maintenance of the enormous amount of dynamic context information in heterogeneous distributed systems. These algorithms are tailored for multimedia services, mobile applications and real-time applications. In addition to these algorithmic efforts, we have designed a middleware framework supporting context awareness.
People
- Qi Han (Faculty)
- Nalini Venkatasubramanian
Publications
- Yun Huang, Shivajit Mohapatra, Qi Han and Nalini Venkatasubramanian, QoS Aware Resource Discovery in Mobile Environments, Chapter VI, The Handbook of Mobile Middleware (ISBN: 0849338336), A. Corradi and P. Bellavista eds., Chapman and Hall/CRC Press, September 2006
- Qi Han and Nalini Venkatasubramanian, Information Collection Services for QoS-aware Mobile Applications, IEEE Transactions on Mobile Computing (TMC), Vol.5, No.5, May 2006
- Qi Han, Sebastian Gutierrez-Nolasco and Nalini Venkatasubramanian, Reflective Middleware for Integrating Network Monitoring with Adaptive Object Messaging, IEEE Network, Special issue on Middleware Technologies for Future Communications Networks, January/Februray 2004
- Qi Han and Nalini Venkatasubramanian, Addressing Timeliness/Accuracy/Cost Tradeoffs in Information Collection for Dynamic Environments, The 24th IEEE International Real-time Systems Symposium (RTSS), Cancun, Mexico, December 3-5, 2003.
- Jehan Wickramasuriya, Qi Han and Nalini Venkatasubramanian, A Directory Enabled Middleware Framework for Distributed Systems, The 8th IEEE International Workshop on Object-oriented Real-time Dependable Systems (WORDS), Guadalajara, Mexico, January 15-17, 2003
- Qi Han and Nalini Venkatasubramanian, A Cost Driven Approach to Information Collection for Mobile Environments, The 4th IEEE International Conference on Mobile and Wireless Communications Networks (MWCN), Stockholm, Sweden, September 9-11, 2002
- Qi Han and Nalini Venkatasubramanian, Aggregation Based Information Collection for Mobile Environments, Journal of High Speed Networks, Vol. 11, No. 3-4, 2002
- Qi Han and Nalini Venkatasubramanian, AutoSeC: An Integrated Middleware Framework for Dynamic Service Brokering, Work-in-Progress Paper in the IFIP/ACM International Conference on Distributed Systems Platforms (Middleware) Heidelberg, Germany, November 12-16, 2001
- Qi Han and Nalini Venkatasubramanian, AutoSeC: An Integrated Middleware Framework for Dynamic Service Brokering, IEEE Distributed Systems Online, Vol. 2, No.7, November 2001
Acknowledgements
This project is supported in part by NSF grant CNS-0855060 and Office of Naval Research (ONR) as part of the DoD Multidisciplinary University Research Initiative (MURI) project CONTESSA.
Enabling Automated Oil and Gas Processes Using Unmanned Mobile Robots
 The main objective of this project is to explore, develop, and demonstrate a robot prototype system for an unmanned process, or process section, to improve safety and increase reliability and to be operated in remote and harsh environments. The presence of toxic gasses (such as H2S) and very high outdoor temperatures in the Middle East region poses great risks to staff on the site of oil and gas facilities, so the clear benefits of using robotic technology for the relevant tasks such as inspection, operations and maintenance of oil and gas facilities are reliability, robustness and flexibility. Such a system will have to perform a number of different tasks, some of which are guided by a remotely located operator or operation team, and some of which are performed automatically by the robot without human intervention.
The main objective of this project is to explore, develop, and demonstrate a robot prototype system for an unmanned process, or process section, to improve safety and increase reliability and to be operated in remote and harsh environments. The presence of toxic gasses (such as H2S) and very high outdoor temperatures in the Middle East region poses great risks to staff on the site of oil and gas facilities, so the clear benefits of using robotic technology for the relevant tasks such as inspection, operations and maintenance of oil and gas facilities are reliability, robustness and flexibility. Such a system will have to perform a number of different tasks, some of which are guided by a remotely located operator or operation team, and some of which are performed automatically by the robot without human intervention.
People
- Qi Han (Faculty)
- Dr. John Steele (Collaborator from Mechanical Engineering)
- Adewole Ayoade (Master’s student in EE)
Publications
-
Adewole Adekola Ayoade, Marshall Sweatt, John Steele, Qi Han, Khaled Al-Wahedi, Hamad Karki, Laser-Based Gap Finding Approach to Mobile Robot Navigation, Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, Alberta, Canada, July 12-15, 2016
- Adewole Ayoade, Marshall Sweatt, John Steele, Qi Han, Khaled Al-Wahedi, and Hamad Karki, William Yearsley, Real-time Sensor Fusion for Mobile Robot Localization in an Oil and Gas Refinery, Proceedings of the 18th International Conference on Mechanization, Automation and Industrial Robotics (ICMAIR), London, United Kingkom, May 23-24, 2016
- Marshall Sweatt, Adewole Ayoade, Qi Han, John Steele, Khaled Al-Wahedi, and Hamad Karki, WiFi Based Communication and Localization of an Autonomous Mobile Robot for Refinery Inspection, International Conference on Robotics and Automation (ICRA), 2015
- John P.H. Steele, Qi Han, Hamad Karki, Khaled Al-Wahedi, Adewole A Ayoade, W Alex Yearsley, Marshall R Sweatt, and Daniel P Albert, Development of an Oil and Gas Refinery Inspection Robot, Proceedings of the 14th ASME International Mechanical Engineering Congress & Exposition (ICONE14), November 14-20, 2014, Montreal, Canada
Acknowledgements
This project is supported by Petroleum Industries in United Arab Empires.
Mobile Social Group Monitoring
Identifying communities is an important research topic in traditional as well as online social networks. A community is a densely connected group of nodes/users such that connections between communities are sparse. This project researches community detection in proximity-based mobile social networks based on their spatio-temporal contact profile, recognition of groups with similar activities such as queuing, differentiation of co-located proximity groups.
People
- Qi Han (Faculty)
- Qiang Li (student collaborator from Chinese Academy of Sciences)
- Yongjian Zhao (student collaborator from Sun Yat-Sen University)
- Na Yu (PhD Student)
Publications
- Qiang Li, Qi Han, Limin Sun, Collaborative Recognition of Queuing Behavior on Mobile Phones, IEEE Transactions on Mobile Computing (TMC), Vol. 15, No. 1, 2016
- Huihui Chen, Bin Guo, Zhiwen Yu, Qi Han, Toward Real-time and Cooperative Mobile Visual Sensing and Sharing, Proceedings of IEEE International Conference on Computer Communicatios (INFOCOM), San Francisco, CA, April 2016
- He Du, Zhiwen Yu, Fei Yi, Zhu Wang, Qi Han, Bin Guo, Group Mobility Classification and Structure Recognition Using Mobile Devices, Proceedings of IEEE International Conference on Pervasive Computing and Communications (PerCom), Sydney, Australia, March 2016
- Na Yu, Yongjian Zhao, Qi Han, Weiping Zhu, Hejun Wu, Identification of Partitions in a Homogeneous Activity Group Using Mobile Devices, Mobile Information Systems, vol. 2016, 14 pages, 2016
- Yongjian Zhao, Qi Han, Spatial Crowdsourcing: Current State and Future Directions, IEEE Communications Magazine, Feature Topic on Social and Mobile Solutions in Ad Hoc and Sensor Networking, Vol. 54, No. 7, 2016
- Na Yu, Qi Han, Context-Aware Community Construction in Proximity-Based Mobile Networks, Mobile Information Systems, vol. 2015, 2015
- Kevin Emergy, Taylor Sallee, Qi Han, Worker Selection for Reliably Crowdsourcing Location Dependent Tasks, Proceedings of International Conference on Mobile Computing, Applications and Services (MobiCASE), Berlin, Germany, November 2015
- Qiang Li, Qi Han, Xiuzhen Cheng, Limin Sun, QueueSense: Collaborative Recognition of Queuing on Mobile Phones, SECON 2014
- Qiang Li, Qi Han, Limin Sun, UserIntent: Detection of User Intent for Triggering Smartphone Sensing Applications, Poster paper, SECON 2014
- Hui Wen, Qiang Li, Qi Han, Shiming Ge, Limin Sun, Poster: Crowdsourcing for Video Traffic Surveillance, poster paper, MobiSys 2014
- Na Yu and Qi Han, Grace: Recognition of Proximity-Based Intentional Groups using Collaborative Mobile Devices, IEEE International Conference on Mobile and Ad-hoc Sensor Systems (MASS), Philadelphia, Pennsylvania, October 2014.
- Qiang Li, Qi Han, and Limin Sun, Context-aware Handoff on Smartphones, IEEE International Conference on Mobile and Ad-hoc Sensor Systems (MASS), Hangzhou, Zhejiang, China, October, 2013.
- Na Yu and Qi Han, Context-aware Community: Integrating Contexts with Contacts for Proximity-based Mobile Social Networking, IEEE International COnference on Distributed Computing in Sensor Systems (DCOSS), Cambridge, Massachusetts, May 21-23, 2013.
- Na Yu and Qi Han, Context-Aware Communities and Their Impact on Information Influence in Mobile Social Networks, Third International Workshop on Pervasive Collaboration and Social Networking (PerCol), in conjunction with PerCom, Lugano, Switzerland, March 2012.
- Na Yu and Qi Han, Group Enabled Spatial Dissemination in Mobile Social Networks, First International Workshop on Internet of Things Applications (IoT), in conjunction with CPSWeek, Beijing, China, April 2012.
Acknowledgements
This project is supported in part by NSF grant CNS-0915574.
Monitoring of Dynamic Amorphous Phenomena
Algorithms and System Support for Monitoring of Amorphous Phenomena with Dynamic Signatures in Wireless Sensor Networks
Emerging applications using wireless sensor networks for critical areas such as environmental monitoring and emergency response highlight the urgent need for more powerful algorithms for tracking amorphous events or phenomena with dynamic identities. Several such events may combine into a large whole or one event may disintegrate into several smaller ones. Current efforts in event detection and tracking have mostly assumed that either events remain distinct, never crossing or passing too close together to become indistinguishable, or if they do cross that they were identified prior and nothing new has formed. This project addresses the research challenges in designing and implementing a system that is capable of tracking events with or without well-defined shapes and identities in the presence of stringent energy constraints and unpredictable network failures posed by wireless sensor networks. Specific research objectives include: design and evaluation of algorithms that detect and track any types of events including amorphous phenomena with dynamic signatures and events that possess a static shape with a crisp boundary; design and evaluation of algorithms that form and reform communication structures around events of interest; and development of an integrated system that provides interfaces to high level application tasks to execute on each identified event. Successful completion of this project will result in a rich set of tools that can be used by applications monitoring all different types of events.
People
- Qi Han (Faculty)
- Nicholas Hubbell (Master’s Student)
- Gholam Abbas Angouti Kolucheh (Ph.D. Student)
- Inigo Urteaga
Publications
- Na Yu and Qi Han, Grace: Recognition of Proximity-Based Intentional Groups using Collaborative Mobile Devices, IEEE International Conference on Mobile and Ad-hoc Sensor Systems (MASS), Philadelphia, Pennsylvania, October 2014.
- Na Yu and Qi Han, Context-aware Community: Integrating Contexts with Contacts for Proximity-based Mobile Social Networking, IEEE International COnference on Distributed Computing in Sensor Systems (DCOSS), Cambridge, Massachusetts, May 21-23, 2013.
- Inigo Urteaga, Na Yu, Nicholas Hubbell, and Qi Han, AWARE:Activity Aware Maintenance of Communication Structures for Wireless Sensor Networks, Pervasive and Mobile Computing, Volume 13, August 2014, Pages 111-124.
- Na Yu and Qi Han, Context-Aware Communities and Their Impact on Information Influence in Mobile Social Networks, Third International Workshop on Pervasive Collaboration and Social Networking (PerCol), in conjunction with PerCom, Lugano, Switzerland, March 2012.
- Na Yu and Qi Han, Detection and Tracking of Mobile Events with Dynamic Signatures Using Mobile Sensors, IEEE Consumer Communications and Networking Conference, (CCNC), Las Vegas, January 2012.
- Nicholas Hubbell and Qi Han, DRAGON: Detection and Tracking of Dynamic Amorphous Events in Wireless Sensor Networks, IEEE Transactions on Parallel and Distributed Systems, Vol. 23, No.7, July 2012
- Inigo Urteaga, Na Yu, Nicholas Hubbell and Qi Han, AWARE: An Activity Aware Network Clustering Algorithm for Wireless Sensor Networks, The 36th IEEE Conference on Local Computer Networks (LCN), Bonn, Germany, October 2011.
- Na Yu and Qi Han, MEMS: Detection and Tracking of Mobile Events Using Mobile Sensors, poster paper, The 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), 2011.
- Nicholas Hubbell and Qi Han, Detection and Tracking of Dynamic Amorphous Events in Wireless Sensor Networks, The 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), 2011.
- Gholam Abbas Angouti Kolucheh and Qi Han, SUSTAIN: An Adaptive Fault Tolerance Service for Geographically Overlapping Wireless Cyber-Physical Systems, The 9th Workshop on Adaptive and Reflective Middleware (ARM), in conjunction with ACM Middleware, Bangalore, India, November 2010.
Acknowledgements
This project is supported in part by NSF grant CNS-0915574.
Quality-aware Sensor Data Collection
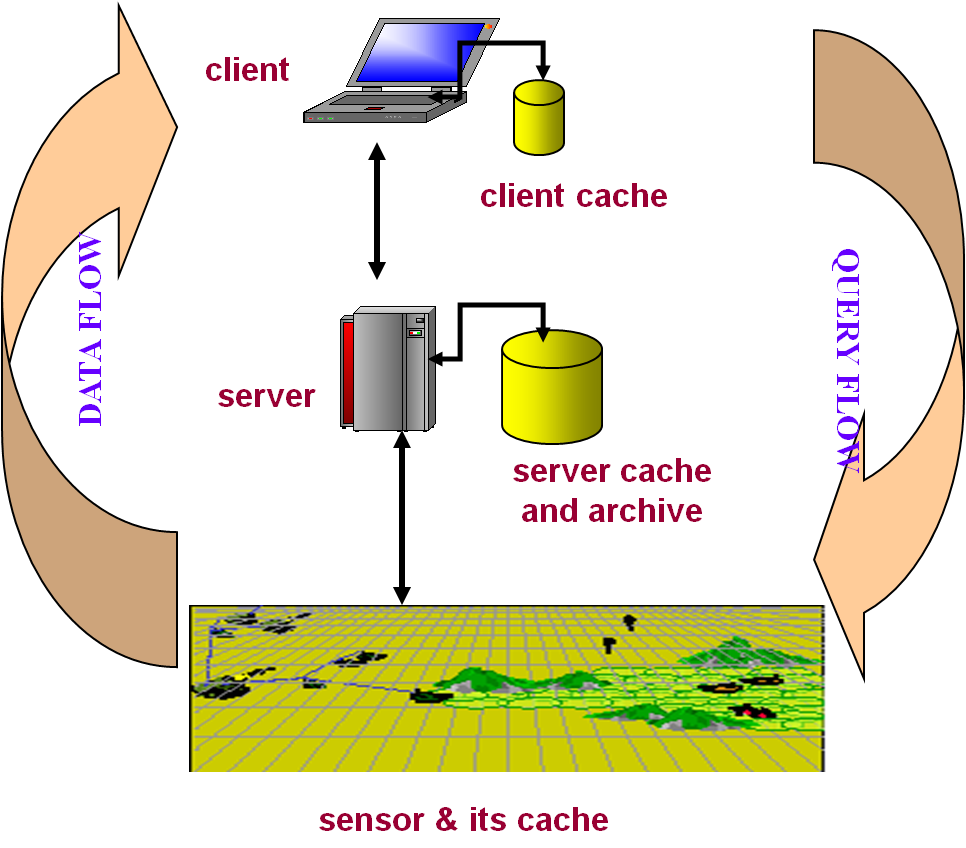
Sensor devices are promising to revolutionize our interaction with the physical world by allowing continuous monitoring and reaction to natural and artificial processes at an unprecedented level of spatial and temporal resolution. As sensors become smaller, cheaper and more configurable, systems incorporating large numbers of them become feasible. Besides the technological aspects of sensor design, a critical factor enabling future sensor-driven applications will be the availability of an integrated infrastructure taking care of the onus of data management. Ideally, accessing sensor data should be no difficult or inconvenient than using simple SQL.
In this project, we investigate some of the issues that such an infrastructure must address. Unlike conventional distributed database systems, a sensor data architecture must handle extremely high data generation rates from a large number of small autonomous components. And, unlike the emerging paradigm of data streams, it is infeasible to think that all this data can be streamed into the query processing site, due to severe bandwidth and energy constraints of battery-operated wireless sensors. Thus, sensing data architectures must become quality-aware, regulating the quality of data at all levels of the distributed system, and supporting user applications’ quality requirements in the most efficient manner possible. The long term goal of this project is to integrate various ideas at the sensor, middleware and application levels into a unified system which will be easily customized to individual sensing applications, but will be generic and modular enough to be useful to a large class of such applications.
People
- Qi Han (Faculty)
- Lilia Paradis (Master’s Student)
- Iosif Lazaridis
- Sharad Mehrotra
- Nalini Venkatasubramanian
Publications
- Randeep Yahathugoda, Qi Han, What does Quality-aware Data Collection Really Achieve in Energy Harvesting Wireless Sensor Networks? International Journal of Sensor Networks (IJSNet), vol. 22, no. 1, 2016.
- Liqun Li, Guoliang Xing, Qi Han and Limin Sun, ASM: Adaptive Voice Stream Multicast over Low-power Wireless Networks, IEEE Transactions on Parallel and Distributed Systems, Vol. 23, No. 4, April 2012.
- Qi Han, Doug Hakkarrinen, Pruet Boonma and Jun Suzuki, Quality-Aware Sensor Data Collection, International Journal of Sensor Networks, Special Issue on Data Quality Management in Wireless Sensor Networks, Vol. 7, No. 3, 2010.
- Chris Davison, Daniel Massaguer, Lilia Paradis, M. Reza Rahimi, Bo Xing, Qi Han, Sharad Mehrotra and Nalini Venkatasubramanian, Practical Experiences in Enabling and Ensuring Quality Sensing In Emergency Response Applications, International Workshop on Pervasive Networks for Emergency Management (PerNEM), in conjunction with IEEE PerCom, Mannheim, Germany, March 2010.
- Liqun Li, Guoliang Xing, Qi Han, and Limin Sun Adaptive Voice Stream Multicast over Low-power Wireless Networks, The 31st IEEE Real-Time Systems Symposium (RTSS), November 30 – December 3, 2010 San Diego, CA, USA.
- Inigo Urteaga, Kevin Barnhart, and Qi Han, REDFLAG: A REal-time, Distributed, Flexible, Lightweight, And Generous Fault Detection Service for Data-driven Sensor Applications, Pervasive and Mobile Computing (PMC), Vol. 5, No. 5, October 2009.
Read more about REDFLAG here. - Inigo Urteaga, Kevin Barnhart, and Qi Han, REDFLAG: A REal-time, Distributed, Flexible, Lightweight, And Generous Fault Detection Service for Data-driven Sensor, Applications, IEEE International Conference on Pervasive Computing and Communications (PerCom), Gavelston, TX, March 2009.
Read more about REDFLAG here. - Iosif Lazaridis, Qi Han, Sharad Mehrotra and Nalini Venkatasubramanian, Fault-Tolerant Evaluation of Continuous Queries over Sensor Data, International Journal on Distributed Sensor Networks (IJDSN), Vol. 5, No. 4, 2009.
- Lilia Paradis and Qi Han, A Data Collection Protocol for Real-time Sensor Applications, Pervasive and Mobile Computing (PMC), Vol. 5, No. 1, 2009.
- Doug Hakkarinen and Qi Han, Data Quality Driven Sensor Reporting, The First IEEE Workshop on Quality of Information in Sensor Networks (QoISN), October 2008.
- Lilia Paradis and Qi Han, TIGRA: Timely Sensor Data Collection using Distributed Graph Coloring, IEEE International Conference on Pervasive Computing and Communications (PerCom), Hong Kong, China, March 2008.
- Pruet Boonma, Qi Han and Jun Suzuki, Leveraging Biologically-inspired Mobile Agents Supporting Composite Needs of Reliability and Timeliness in Sensor Applications, IEEE International Conference on Frontiers in the Convergence of Bioscience and Information Technologies (FBIT), Jeju Island, Korea, October 2007.
- Qi Han, Sharad Mehrotra and Nalini Venkatasubramanian, Application-aware Integration of Data Collection and Power Management in Wireless Sensor Networks, Journal of Parallel and Distributed Computing (JPDC), Vol. 67, No. 9, September 2007, Pages 992-1006
- Lilia Paradis and Qi Han, A Survey of Fault Management in Wireless Sensor Networks, Journal of Network and Systems Management (JNSM), Vol. 15, No. 2, June 2007
- Iosif Lazaridis, Qi Han, Sharad Mehrotra, Nalini Venkatasubramanian, Fault-Tolerant Queries over Sensor Data, The 13th International Conference on Management of Data(COMAD), Delhi, India, December 2006.
- Qi Han, A Reflective Middleware Architecture for Distributed Sensor Applications, The 5th Workshop on Adaptive and Reflective Middleware (ARM, in conjunction with ACM/IFIP Middleware), Melbourne, Australia, November 2006
- Lilia Paradis and Qi Han, ESCORT: Energy Efficient Support for Sensor Applications with COmposite Needs of Reliability and Timeliness, Poster paper, The International Conference on Distributed Computing in Sensor Systems (DCOSS), San Francisco, California, June 2006
- Qi Han, Iosif Lazaridis, Sharad Mehrotra, Nalini Venkatasubramanian, Sensor Data Collection with Expected Reliability Guarantees, The First International Workshop on Sensor Networks and Systems for Pervasive Computing(PerSeNS), (in conjunction with PerCom), Kauai Island, Hawaii, March 8, 2005
- Inseok Hwang, Qi Han, Archan Misra, MASTAQ: A Middleware Architecture for Sensor Applications with Statistical Quality Constraints, The First International Workshop on Sensor Networks and Systems for Pervasive Computing(PerSeNS) (in conjunction with PerCom), Kauai Island, Hawaii, March 8, 2005
- Qi Han, Matthew Ba Nguyen, Sandy Irani and Nalini Venkatasubramanian, Time-sensitive Computation of Aggregate Functions over Distributed Imprecise Data, The 12th IEEE International Workshop on Parallel and Distributed Real-time Systems (WPDRTS ) (In conjunction with IPDPS 2004), Santa Fe, New Mexico, April 26-27, 2004
- Qi Han, Sharad Mehrotra and Nalini Venkatasubramanian, Energy Efficient Data Collection in Distributed Sensor Environments, The 24th IEEE International Conference on Distributed Computing Systems (ICDCS), Tokyo, Japan, March 23-26, 2004.
- Iosif Lazaridis, Qi Han, Xingbo Yu, Sharad Mehrotra, Nalini Venkatasubramanian, Dmitri Kalashnikov and Weiwen Yang, QUASAR: Quality Aware Sensing Architecture, ACM SIGMOD Record, March 2004
Acknowledgements
This project was supported in part by NSF grants CNS-0855060 and IIS-0086124.
Subsurface Contaminant Monitoring and Prediction using Wireless Sensor Networks
 Release of chemicals or biological agents in the subsurface often results in plumes migrating in the medium, posing risk to human and ecological environments. Temporal and spatial monitoring of the plume concentrations are needed to assess risk, make decisions and take remedial action. Current underground contaminant plume monitoring technologies are inefficient, expensive and ineffective. Wireless sensor technologies have the potential to dramatically improve this process.
Release of chemicals or biological agents in the subsurface often results in plumes migrating in the medium, posing risk to human and ecological environments. Temporal and spatial monitoring of the plume concentrations are needed to assess risk, make decisions and take remedial action. Current underground contaminant plume monitoring technologies are inefficient, expensive and ineffective. Wireless sensor technologies have the potential to dramatically improve this process.
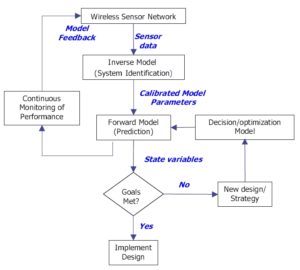 A closed-loop system integrating wireless sensor network based monitoring with numerical models for plume tracking is being developed, in which sensor data continuously calibrates and validates the system identification and prediction models, while the output from these models direct the sensor network operation to optimize constraints such as accuracy and power consumption. The system is based on a novel virtual sensor network architecture with broader applicability beyond plume tracking. Algorithms and protocols being developed support the formation, usage, adaptation and maintenance of dynamic subsets of collaborating sensors, named Virtual Sensor Networks (VSNs). VSN protocols for collaboration among groups of sensors will greatly ease the task of deploying sensor networks, especially in environments where multiple geographically overlapping applications are deployed. A proof-of-concept laboratory test bed that captures the complex subsurface processes is used for integration and evaluation of VSN protocols. This interdisciplinary project significantly advances the state-of-the art in subsurface plume tracking and sensor networking technologies. It stimulates a unique partnership of electrical engineers, computer scientists and environmental researchers, and demonstrate closed-loop operation of computer models and sensor networks to solve complex environmental problems.
A closed-loop system integrating wireless sensor network based monitoring with numerical models for plume tracking is being developed, in which sensor data continuously calibrates and validates the system identification and prediction models, while the output from these models direct the sensor network operation to optimize constraints such as accuracy and power consumption. The system is based on a novel virtual sensor network architecture with broader applicability beyond plume tracking. Algorithms and protocols being developed support the formation, usage, adaptation and maintenance of dynamic subsets of collaborating sensors, named Virtual Sensor Networks (VSNs). VSN protocols for collaboration among groups of sensors will greatly ease the task of deploying sensor networks, especially in environments where multiple geographically overlapping applications are deployed. A proof-of-concept laboratory test bed that captures the complex subsurface processes is used for integration and evaluation of VSN protocols. This interdisciplinary project significantly advances the state-of-the art in subsurface plume tracking and sensor networking technologies. It stimulates a unique partnership of electrical engineers, computer scientists and environmental researchers, and demonstrate closed-loop operation of computer models and sensor networks to solve complex environmental problems.
People
- Qi Han (Faculty)
- Nicholas Hubbell (Master’s Student)
- Tissa Illangasekare (Co-PI, Division of Environmental Science and Engineering, Colorado School of Mines)
- Toshi Sakaki (Co-PI, Division of Environmental Science and Engineering, Colorado School of Mines)
- Anura Jayasumana (PI at Colorado State University)
- Kevin Barnhart (Environmental Science and Engineering, PhD student)
- Paul Shulte (CS, MS student)
- Lisa Porta (Environmental Science and Engineering, MS student)
- Kyle Fullerton (Undergraduate Student)
- Anhvu Le (Undergraduate Student)
- Philip Loden (Undergraduate Student)
- Alex Osecky (Undergraduate Student)
- Breian Wells (Undergraduate Student)
Publications
- Kevin Barnhart, Inigo Urteaga, Qi Han, Anura P.Jayasumana, and Tissa Illangasekare, On Integrating Groundwater Transport Models with Wireless Sensor Networks, Journal of Ground Water, Vol. 48, No. 5, September/October 2010.
- Qi Han, Doug Hakkarrinen, Pruet Boonma and Jun Suzuki, Quality-Aware Sensor Data Collection, International Journal of Sensor Networks, Special Issue on Data Quality Management in Wireless Sensor Networks, Vol. 7, No. 3, 2010.
- Paul Shulte, Design of Experiments in a Three Dimensional Synthetic Aquifer for Evaluation of Wireless Sensor Network Technologies Applied to Real-time Model Calibration and Plume Management, Master’s Thesis, 2009, Division of Environmental Science and Engineering, Colorado School of Mines
- Philip Loden, Qi Han, Lisa Porta, Inigo Urteaga, Kevin Barnhart, Doug Hakkarinen, Tissa Illangasekare and Anura Jayasumana, A Wireless Sensor System for Validation of Real-time Automatic Calibration of Groundwater Transport Models, Journal of Systems and Software, Vol. 82, No. 11, November 2009.
- Inigo Urteaga, Kevin Barnhart, and Qi Han, REDFLAG: A REal-time, Distributed, Flexible, Lightweight, And Generous Fault Detection Service for Data-driven Sensor Applications, Pervasive and Mobile Computing (PMC), Vol. 5, No. 5, October 2009.
Read more about REDFLAG here. - Lisa Porta, Tissa H. Illangasekare, Philip Loden, Qi Han, Anura P. Jayasumana, Continuous Plume Monitoring Using Wireless Sensors: Proof of Concept In Intermediate Scale Tank, ASCE’s Journal of Environmental Engineering, Vol. 135, No. 9, September 2009.
- Ying Zhu and Qi Han, The More Relay Nodes, The More Energy Efficient? IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Vancouver, Canada, August 2009.
- Inigo Urteaga, Kevin Barnhart, and Qi Han, REDFLAG: A REal-time, Distributed, Flexible, Lightweight, And Generous Fault Detection Service for Data-driven Sensor, Applications, IEEE International Conference on Pervasive Computing and Communications (PerCom), Gavelston, TX, March 2009.
Read more about REDFLAG here. - Dulanjalie C. Dhanapala, Anura P. Jayasumanaand Qi Han, Performance of Random Routing on Grid-based Sensor Networks, IEEE International Conference on Consumer Communications and Networking Conference (CCNC), January 2009.
- Doug Hakkarinen and Qi Han, Data Quality Driven Sensor Reporting, The First IEEE Workshop on Quality of Information in Sensor Networks (QoISN), October 2008.
- Kevin Barnhart, Inigo Urteaga, Qi Han, Anura P. Jayasumana and Tissa Illangasekare, Integration of Groundwater Transport Models with Wireless Sensor Networks, MODFLOW and More: Ground Water and Public Policy, May 2008.
- Qi Han, Anura P. Jayasumana, Tissa Illangasekare and Toshi Sakaki, A Wireless Sensor Network based Closed-loop System for Subsurface Contaminant Monitoring, NSF Workshop on Next Generation Software (NSFNGS, in conjunction with IEEE IPDPS), Miami, Florida, April 2008.
- Lisa Porta, 2007. “Continuous Plume Monitoring and Model Calibration Using a Wireless Sensor Network: Proof of Concept in Intermediate Scale Tank”. M.S. Thesis.
- Anura Jayasumana, Qi Han, Tissa H. Illangasekare, Virtual Sensor Networks – A Resource Efficient Approach for Concurrent Applications,The 4th IEEE International Conference on Information Technology – Next Generations (ITNG), Las Vegas, NV, April, 2007
Acknowledgements
This project is supported in part by NSF CSR grants CNS-0720875 and CNS-0720889.